
ربات ها در اکتشاف فضا
از نظر تاریخی، نقش روبات ها در اکتشافات فضایی به دلیل شرایط غیرقابل سکونت سیارات غیرزمینی در منظومه شمسی قابل توجه بوده است. طبق گفته AZO Robotics، ربات به عنوان “دستگاه خودکنترلی متشکل از واحدهای الکترونیکی، الکتریکی یا مکانیکی که می تواند به جای یک عامل زنده عمل کند” تعریف می شود. در این پست، با برخی از تاریخچه های اولیه در مورد ربات ها در اکتشاف فضا و 5 مورد از محبوب ترین سیستم های روباتیک مورد استفاده در تاریخ فضا آشنا خواهید شد.
قبل از اینکه دانشمندان شروع به ارسال روباتها به فضا کنند، حیواناتی مانند سگ یا میمون اغلب برای تکمیل وظایف و انجام آزمایشها فرستاده میشدند تا دانش بشر را از شرایط موجود در سیارات دیگر و ماه افزایش دهند.

با پیشرفت فناوری روباتیک، بیشتر این آزمایشات و وظایف به جای موجودات زنده به روبات ها واگذار شده است. به این ترتیب رباتیک زندگی را حفظ می کند. در حالی که انسان ها پا به ماه گذاشته اند، دانش علمی در مورد شرایط سیارات از جمله مریخ، زهره، تیتان و مشتری تقریباً منحصراً از اکتشافات انجام شده توسط روبات ها ناشی می شود. از آنجایی که فناوری به تدریج به روباتها اجازه میدهد سریعتر به فضا برسند، انسانها میتوانند اطلاعات بیشتری در مورد شرایط فضا به دست آورند.
5 ربات فضایی باورنکردنی که برای اکتشاف و سفر در فضا استفاده شده اند
ربات فضایی 1: اسپوتنیک 1
به گفته ناسا، اولین رباتی که تا کنون به فضا فرستاده شده اسپوتنیک 1 بود که توسط اتحاد جماهیر شوروی در 4 اکتبر 1957 فرستاده شد. اسپوتنیک 1 اولین ماهواره مصنوعی زمین و اولین جسمی بود که توسط انسان به دور زمین چرخید. پرتاب اسپوتنیک 1 آغاز “مسابقه فضایی” بدنام بین ایالات متحده و اتحاد جماهیر شوروی بود. پس از آن، مهندسان به طور فزاینده ای شروع به ساخت ربات هایی برای ارسال به سیارات غیرزمینی برای اهداف مختلف کردند، از عکاسی نزدیک از سیارات تا تعیین اینکه آیا سیارات دیگر حیات دارند یا خیر.
ربات فضایی 2: مارینر 2 و 4
به گزارش Universe Today، در 14 دسامبر 1962، کاوشگر فضایی آمریکایی Mariner 2 اولین کاوشگر فضایی رباتیکی بود که پرواز موفقیت آمیز زهره را انجام داد. Mariner 4، اولین مدارگردی بود که به فضا فرستاده شد. سپس اولین عکس های نزدیک به مریخ را در 14 ژوئیه 1965 گرفت. در حالی که نقش فرودگرها در درجه اول تشخیص علائم حیات در سیارات است. نقش مدارگردها در درجه اول گرفتن عکس برای دانشمندان است. برای مشاهده و تجزیه و تحلیل از آنجایی که نقشهای این رباتها متفاوت است، مدارگردها و فرودگرها اغلب برای کاوش در فضا به صورت پشت سر هم فرستاده میشوند.
ربات فضایی 3: وایکینگ 1 و 2
به گفته ناسا، در 20 آگوست 1975، پروژه وایکینگ ناسا زمانی آغاز شد که وایکینگ 1 برای کاوش مریخ به فضا پرتاب شد. اندکی پس از آن، در 9 سپتامبر 1975، یک فضاپیمای مشابه به نام وایکینگ 2 با همان مأموریت به فضا پرتاب شد. هر دو فضاپیما به فناوری رباتیک مشابه مارینر 2 و 4 مجهز بودند – یک فرودگر و یک مدارگرد. نقش مدارگردها عکاسی از سطح مریخ بود. در حالی که فرودگرها باید روی این سیاره فرود می آمدند و داده ها را جمع آوری می کردند تا دانشمندان درباره وجود حیات در مریخ بیشتر بدانند. مدارگردهای هر فضاپیما با هم پرواز کردند. اما فرودگرها در نهایت برای کاوش در مناطق مختلف سطح مریخ از هم جدا شدند.
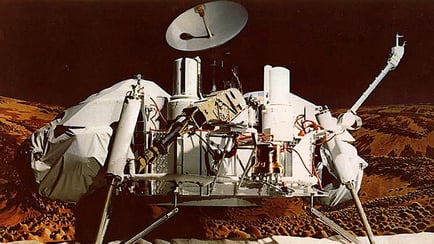
ربات ها در اکتشاف فضا: وایکینگ 1
تقریبا یک سال بعد، در 20 ژوئیه 1976، وایکینگ لندر 1 اولین فضاپیمای ایالات متحده بود که بر سطح مریخ (در منطقه ای به نام Chryse Planitia) فرود آمد. در 3 سپتامبر 1976 فرودگر وایکینگ 2 در منطقه دیگری از سیاره به نام Utopia Planitia بر سطح مریخ نشست. در حالی که انتظار می رفت ماموریت وایکینگ تنها 90 روز پس از فرود آمدن هر فرودگر به طول انجامد، هر دو فرودگر بیش از عمر طراحی شده خود باقی ماندند. Viking Orbiter 1 1489 مدارگردی خود را انجام داد و ماموریت خود را در 7 آگوست 1980 به پایان رساند. در حالی که Viking Orbiter 2 ماموریت خود را در 25 جولای 1978 به پایان رساند. آخرین ارسال اطلاعات توسط وایکینگ لندر 1 به زمین در 11 نوامبر 1982 بود در حالی که آخرین ارسال وایکینگ لندر 2 در 11 آوریل 1980 بود.
ربات فضایی 4: ویجر 1 و 2
ربات ها در سال 1977 زمانی که وویجرهای 1 و 2 برای مطالعه منظومه شمسی بیرونی به فضا پرتاب شدند، از منظومه شمسی خارج شدند. به گفته ناسا، این دو ربات برای انجام مطالعات نزدیک مشتری و زحل، حلقههای زحل، و مشتری و بزرگترین قمر زحل طراحی شدهاند. این دو ربات بیش از 40 سال به این سفر ادامه داده اند و در حال حاضر به پلوتون نزدیکتر هستند تا زمین یا خورشید. آگوست 2012 بود که وویجر 1 وارد فضای بین ستارهای شد. در حالی که وویجر 2 در نهایت در 5 نوامبر 2018 وارد این فضا شد. هر دو ربات در حال حاضر هنوز اطلاعات را از طریق شبکه فضایی عمیق (DSN) در حال ارتباط هستند.
ربات فضایی 5: دکستر
اخیراً، انجمن فضایی کانادا دکستر را پرتاب کرد. یک بازوی رباتیک که برای «نصب و جایگزینی تجهیزات کوچکی مانند دوربینهای خارجی یا باتریهای 100 کیلوگرمی مورد استفاده در ایستگاه فضایی، جایگزینی اجزای معیوب در سیستمهای الکتریکی ایستگاه و آزمایش ابزارهای جدید طراحی شده است.” به گفته آژانس فضایی کانادا، دکستر از نظر فنی پیشرفتهترین ربات فضایی است که تاکنون ساخته شده است.
دکستر در حال حاضر توسط تیم های کنترل زمینی از انجمن فضایی کانادا و ناسا اداره می شود. بازو های رباتیک دکستر به تنهایی با یک آچار موتوردار، یک کانکتور برق جمع شونده، اتصال داده و ویدئو، دوربین و چراغ ها کامل می شود. بازوهای رباتیک دکستر به گونه ای طراحی شده اند که بتوانند تجهیزات بزرگ و شکننده را به طور یکسان در دست بگیرند و دکستر را با شرایط و پروژه های مختلف سازگار کنند. در سال 2008، دکستر در ایستگاه فضایی بینالمللی نصب شد و سپس در شاتل فضایی اندیوور پرتاب شد.
بر اساس گزارش CNET، برخی از روباتهایی که در حال کاوش در فضا هستند عبارتند از: دکستر، وویجر 1 و 2، تلسکوپ فضایی هابل، کاسینی، روبونات 2، روزتا، داون، مریخ اکسپرس، کنجکاوی، فرصت، ادیسه مریخ 2001، کاوشگر ترکیب پیشرفته، هایابوسا 2، جونو، ماموریت مدارگرد مریخ، افق های جدید و موارد دیگر. از مزایای توسعه و ارسال روباتها به فضا میتوان به دانش علمی غنی، حفظ جان انسانها و پیشرفت در فناوری هوش مصنوعی اشاره کرد. با پیشرفت تکنولوژی، ربات ها به طور فزاینده ای به عنوان پنجره معاصر انسان ها به دنیای فراتر از زمین عمل می کنند.
گردآوری و ترجمه: مهندس سبحان جوان
منبع: https://blog.bliley.com/